Motor Calibration¶
Because of assembly methods and other reasons, your motor may still need a calibration direction. Otherwise, when the car moves forward, it may turn left, turn right, or even go backwards. Please follow the following steps to complete the calibration.
How to do?
Enter the examples folder.
cd /home/pi/picar-4wd/examples
Run the
move_forward.py. This is a very simple example, which will let the car go forward.
python3 move_forward.py
Observe whether the wheels of the car are driving forward and marked the wrong motor.
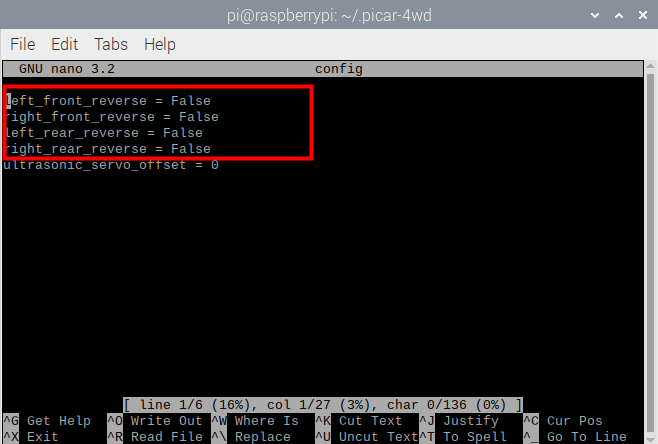
Open the configuration file.
sudo nano /home/pi/.picar-4wd/config
Change the reverse FLAG of the error motor from
FalsetoTrue.
Run again
move_forward.py, if the car is driving correctly, the calibration is completed.
python3 move_forward.py